Control Engineering Services for
Marine Industry
CONSULTANCY TRAINING EXAMPLES OF OUR WORK
Consultancy
We can provide technical support for early stage feasibility studies of control strategies or undertake troubleshooting problems for in-service or near-service control systems that are proving problematic.
We are experienced in using dynamic simulations to assess the feasibility of achieving the required control performance, by exploring different sensor types and combinations, and the most effective feedback control scheme. If the assessment had indicated that it needed something too big, too expensive or insufficient performance would result, early decisions could have been made.
Depending on applications, simulations may be built using a range of modelling packages MATLAB/Simulink, LabVIEW and the Control Design and Simulation (CD&Sim) module, etc. Models are kept as simple as possible for the purpose of evaluating dynamic performance.
We are also experienced in implementing control algorithms in full on National Instruments' suite of real-time hardware using its LabVIEW Real-Time, LabVIEW FPGA, LabVIEW MathScript RT and LabVIEW Touch Panel modules.
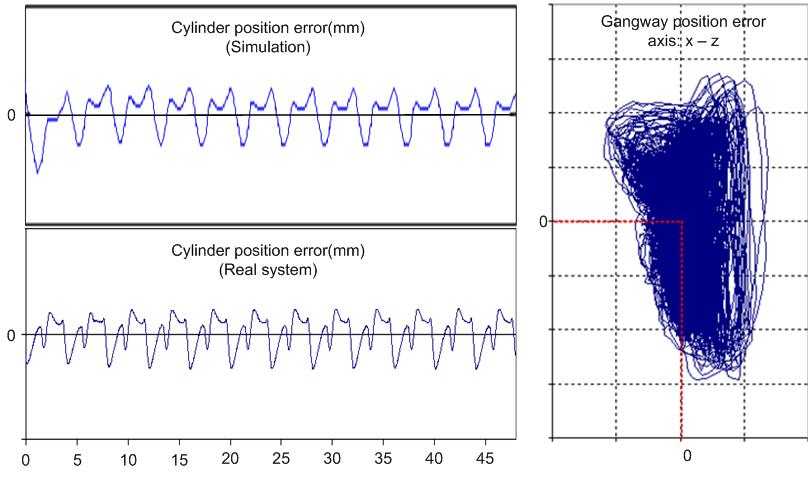
Modelling Errors
Training
We provide standard, industry specific and bespoke courses on a range of fundamental and advanced control engineering topics.
More Information
Industry-Specific Training
We can adapt individual courses to suit your company's industry/business.(Examples)
Looking for control improvement?