Control Engineering Consultancy
STRATEGY DEFINITION
IMPROVEMENT
IMPLEMENTATION
ADVANCED R&D
SYSTEM IDENTIFICATION
BENCHMARKING
EXAMPLES OF OUR WORK
CUSTOMER FEEDBACK
WHAT WE DO
"Simplicity is a key objective in our solutions, providing performance criteria can be met."
We know control engineering inside out. An in-depth understanding of control technologies together with first-hand experience in diverse industrial applications uniquely positions us to deliver exceptional value to our clients.
Our control engineering services cover the following:
- Control Improvement
- Control Strategy Definition
- Implementation
- Advanced Control Research and Development
- System Identification
- Control Benchmarking
Control Strategy Definition
We help clients define and design effective control strategies from simple classical feedback or feedforward to advanced control.
A proper assessment of the process as a whole is undertaken, including effects on neighbouring/coupled systems and processes. Control objectives, disturbances, nonlinearities, uncertainties, robustness and noise immunity are all considered when a control strategy is developed.
Solutions can range from simple classical feedback or feedforward to advanced control, such as model-based methods like MPC or methods like Fuzzy Logic control. However, simplicity is a key objective in our solutions, providing performance criteria can be met.
Many of our control design projects involve the development of a nonlinear dynamic model to assess effectiveness in simulation. This allows the new control solution to be compared against the existing to quantify benefits, and then be deployed with confidence.
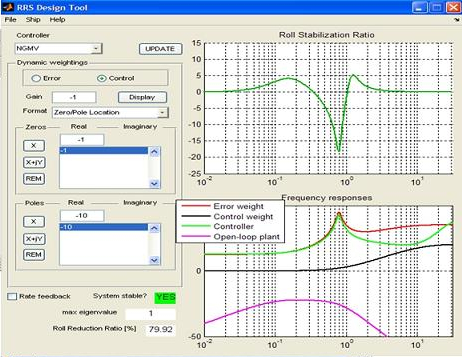
We have experience with a range of predictive and other advanced control algorithms and software packages, varying from the standard MATLAB Model Predictive Control Toolbox to our own advanced tools for nonlinear MPC (NMPC) and nonlinear generalised minimum variance (NGMV) control.
Implementation
We provide clients with full implementation using the National Instruments series of hardware targets for LabVIEW (e.g. CompactRIO and FPGA, PXI, and I/O modules).
Where full implementation is not required, we can offer implementation support to the client.
INDUSTRIES WE SERVE
Our control engineering consultancy services are available to a range of industries:

Development of Gripper Arms Control System
Interested to Know More?
Download our quick guide on how to choose control engineering support